La idea de realizar esta prueba a los compiladores más conocidos para microcontroladores PIC de gama media surgió hace unos meses, en el grupo de facebook Electrónica y Microcontroladores, ante la curiosidad por comprobar si el compilador experimental PicPas era tan eficiente como suponíamos. Entendiéndose como más eficaz, el que consiga un tamaño del ejecutable menor y usar menos memoria RAM del microcontrolador.
Cuanto mayor sea esta eficacia del compilador, más sencillo y económico será el microcontrolador necesario para ejecutar el código generado.
Para poder comparar la eficiencia de los distintos compiladores (comerciales y gratuitos) a los que teníamos acceso, se utilizó un código que podríamos denominar «patrón de medida«, mucho más complejo que el usado para manejar la típica secuencia de encendido y apagado de uno o varios diodos LED que a modo de demostración suelen utilizar todos los compiladores.
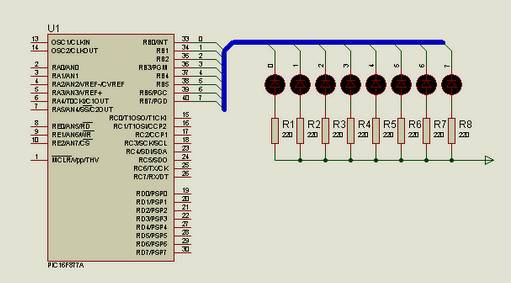
El programa (patrón de medida) se debe traducir de la manera más literal posible a cada uno de los lenguajes de programación (C, Pascal, BASIC) y los «dialectos» o particularidades específicas de cada compilador, de manera que no influya en la prueba el tipo de algoritmo más o menos eficaz, o la genialidad del programador para codificarlo en un determinado lenguaje. Por eso se trata de un «programa patrón de medida«, y es el compilador evaluado el que deberá, automáticamente, generar el código ejecutable más optimizado o que menos recursos del microcontrolador requiera.